이 문서 ‘그림 특징점 추출 방법’이에 대해 작성한 글입니다.
이미지에서 특징점을 추출하는 방법인 특징점 추출과 관련된 변경 사항 요약을 참조하십시오.
1. 동영상 특징 포인트
동영상에서 물체를 추적하거나 감지할 때 비디오에서 비디오로 일치이를 수행하는 가장 일반적인 방법은 다음과 같습니다. 핵심 포인트 추출을 통한 매칭좋은 키포인트를 추출하기 위해서는 사물의 모양이나 크기, 위치가 바뀌어도 쉽게 알 수 있거나, 화각이 달라도 쉽게 찾을 수 있는 키포인트를 찾는 것이 필요하다. 변경되거나 카메라의 조명이 변경됩니다.
영상에서 이러한 조건을 충족하는 최고의 핵심 포인트 원뿔 점그리고 대부분의 핵심점 추출 알고리즘은 이 꼭지점 감지를 기반으로 합니다.
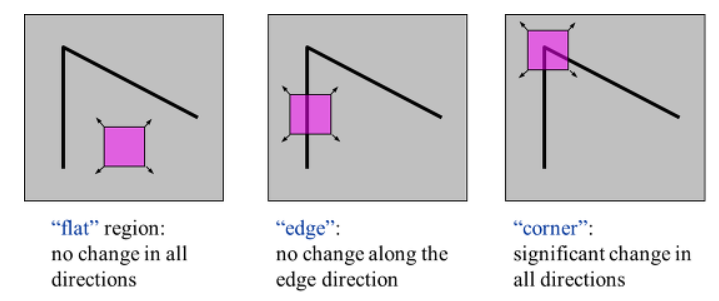
2. 해리스 코너
영상에서 꼭지점과 핵심점을 찾는 가장 대표적인 방법은 1988년에 발표된 Harris corner detector이다. 이미지에서 모서리를 찾는 기본 아이디어는 이미지의 작은 창이 모서리 지점에서 약간 이동하면 모든 방향의 이미지 변화가 커야 한다는 것입니다.
이 아이디어는 원래 1980년 Moravec 코너 검출기에서 나온 것입니다. 이 아이디어를 구현하기 위해 moravec은 윈도우가 각각 수직, 수평, 왼쪽 대각선 및 오른쪽 대각선의 네 방향으로 1픽셀씩 이동할 때 이미지 변화량(SSD) E를 계산합니다. 이미지의 픽셀 위치, 그리고 E의 최소값을 해당 픽셀의 이미지 변화 값으로 설정하고, 설정된 min(E) 값이 국소적으로 최대가 되는 지점을 찾는 방법을 정점으로 사용한다.
Harris-Conner 검출기는 Moravec 방법의 수정된 버전입니다. Harris 검출기는 이미지 이동 및 회전의 변화에 대해 불변하며 친화도 및 조명의 변화에 대해 어느 정도 견고함을 나타냅니다. 그러나 이미지 스케일의 변화에 영향을 받기 때문에 응용 프로그램에 따라 다른 이미지 스케일에서 특징점을 추출해야 합니다.

3.시프트
SIFT(Scale Invariant Feature Transform)는 2004년 발표된 특징점 추출 알고리즘이다. 기존의 해리스 코너가 영상의 스케일 변화에 민감한 문제를 해결하기 위해 DoG(Difference of Gaussian)를 기반으로 영상뿐만 아니라 스케일 축에서도 최대 코너링 지점을 찾는다.
SIFT에서 이미지 i가 있는 경우 i의 크기는 단계적으로 축소되어 일련의 축소된 이미지(이미지 피라미드)를 생성합니다. 이때 정점(정점 로컬 최대값 및 임계값 이상)입니다. 그런 다음 각 스케일 이미지에 대해 정점을 인식하고 대부분의 경우 동일한 점이 여러 인접 이미지 스케일에서 정점으로 인식됩니다. 이 아래에는 스케일 축을 따라 최대 코너 특성을 가진 지점이 있습니다. 이 점 스케일 불변 특성그것은 말한다.

스케일 불변 특징점은 입력 이미지의 스케일에 관계없이 찾을 수 있습니다. SIFT는 IAPLACIAN 값이 이미지 피라미드에서 최대 또는 최소가 되는 지점을 특징점으로 취합니다.
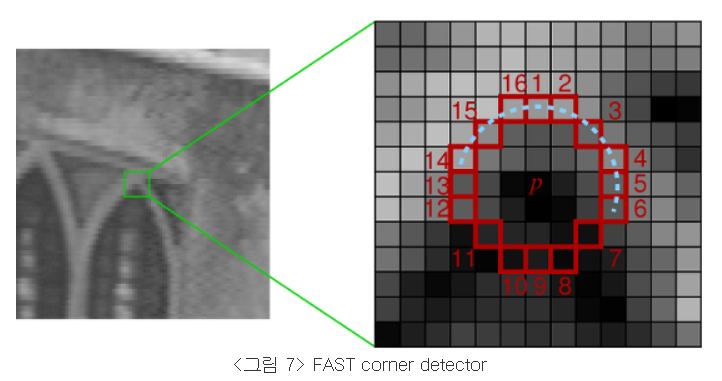
4. 빠른
2006년 발표된 FAST(Features from Accelerated Segment Test)는 초고속을 목표로 하는 특징점 추출 알고리즘이다. FAST는 속도에 최적화되어 있지만 특징점의 반복성은 기존 방식보다 우수합니다.
FAST에서는 p를 중심으로 반지름이 3인 원 위의 16픽셀 값을 보고 점 P가 모서리인지 여부를 판단합니다. 연속적으로 n개 이상의 픽셀이 p보다 일정 값만큼 밝거나 n개 이상의 픽셀이 일정 값 이상 어두우면 p를 꼭지점으로 결정합니다.
점 p가 정점인지 여부를 판단하기 위해 FAST 알고리즘에서 동일한 유형의 연속된 점의 수를 직접 세는 대신, 의사 결정 트리를 사용하여 핵심 사항을 신속하게 결정이를 위해 픽셀의 밝기 값을 p보다 훨씬 밝거나 어두운 경우와 p와 유사한 경우의 세 가지 값으로 나누고 주변 픽셀의 밝기 분포를 다음과 같은 16차원 삼항 벡터로 표현합니다. 이 값들. 정점인지 여부를 분류하기 위해 결정 트리에 입력합니다.
FAST 코너의 문제점은 점 p를 꼭짓점으로 인식할 때 p 옆의 이웃점들도 꼭짓점으로 인식하는 경우가 많다는 점이다. FAST는 이 문제를 해결하기 위해 비최대 억제 후처리 방법을 사용합니다. 인접한 여러 점에서 최대 모서리 속성을 가진 점만 남고 나머지는 제거됩니다.
참조
- (블로그) 이미지 키포인트 추출 방법: https://darkpgmr.131
- (Blong) ORB-SLAM: 다양하고 정확한 단안 SLAM 시스템: https://blog.naver.com/PostView.nhn?blogId=dnjswns2280&logNo=222086846193&categoryNo=20&parentCategoryNo=0&viewDate=¤tPage=1&postListTopCurrentPage=1&from=search